Το μπαχαλο του SPRF3 με τις κολλες για να μην ξεκολλησει τιποτα απο πανω.
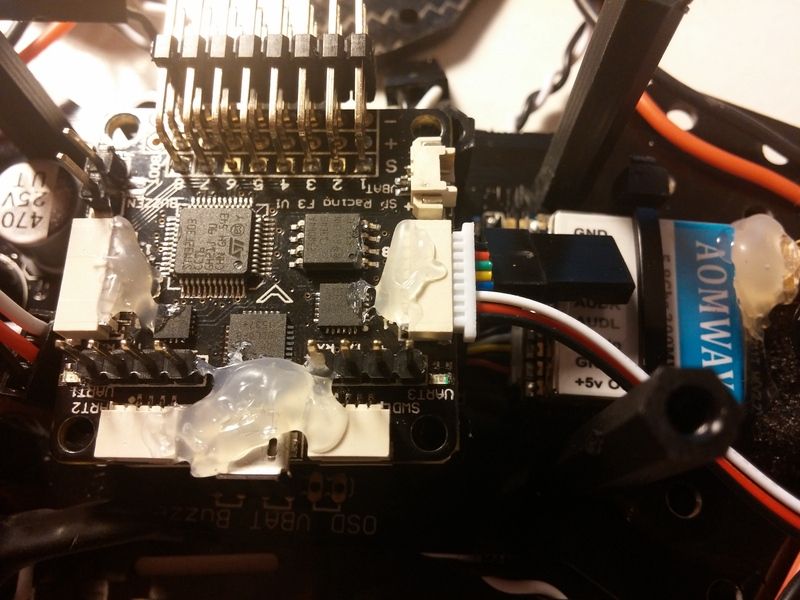
Κόλλησα ολα τα Pins πανω στο κοντρολλερ.
Τα καλώδια απο τα little bees ερχονται με δυσκολία γιατι ειναι μικρά σε μήκος.
Συνδέθηκε το buzzer και το ρευμα απο το 5V regulator του PDB στο FC.
Μετα συνδέθηκε το ρευμα της μπαταρίας στο Vbat του SPRF3 για monitoring και τηλεμετρία. (αυτα δεν φαινονται στις φωτο)
Στο τελος τα ξήλωσα ολα για να αλλάξω κατι, και παραλιγο να καταστρέψω το PDB. Τελικα σώθηκε ευτυχώς απλα μυριζει λιγο καμένο πλαστικό, καλα ειναι
Μετά συνδέθηκε τηλεμετρία στο D4R-ii, οπως λεει αυτος ο τυπος:
https://plus.google.com/+deepimpactioFP ... xfttCoNL73Η διαφορά ειναι οτι εγω το συνέδεσα στο UART3 γιατι βολεύει περισσότερο.
Πράσινο και μαύρο απο το D4R-II πανε στα Tx/Rχ του UART3.
Με απλη ενεργοποίηση του FrSky telemetry στο port UART3 μεσα απο το configurator, και στη συνεχεια τα στέλνει ολα στην Taranis
Εχει φλασαριστεί με το Betaflight 2.6.0 και τρεχει 2Khz με ολους τους σενσορες, τηλεμετρια, μονιτορ μπαταρίας, και buzzer
Μετα απο 2-3 μπαταρίες το ρύθμισα καπως, και ιδού το αποτέλεσμα:
# version
# BetaFlight/SPRACINGF3 2.6.0 Mar 31 2016 / 23:01:30 (24b97ae)
# dump master
feature RX_PPM
feature VBAT
feature MOTOR_STOP
feature FAILSAFE
feature TELEMETRY
feature ONESHOT125
set mid_rc = 1500
set min_check = 1100
set max_check = 1900
set rssi_channel = 0
set rssi_scale = 30
set rssi_ppm_invert = OFF
set input_filtering_mode = OFF
set rc_smoothing = OFF
set roll_yaw_cam_mix_degrees = 0
set max_aux_channels = 6
set debug_mode = NONE
set min_throttle = 1130
set max_throttle = 1920
set min_command = 1050
set servo_center_pulse = 1500
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 50
set use_oneshot42 = OFF
set use_multishot = OFF
set motor_pwm_rate = 400
set servo_pwm_rate = 50
set disarm_kill_switch = ON
set gyro_cal_on_first_arm = OFF
set auto_disarm_delay = 5
set small_angle = 25
set fixedwing_althold_dir = 1
set reboot_character = 82
set gps_provider = NMEA
set gps_sbas_mode = AUTO
set gps_auto_config = ON
set gps_auto_baud = OFF
set gps_wp_radius = 200
set nav_controls_heading = ON
set nav_speed_min = 100
set nav_speed_max = 300
set nav_slew_rate = 30
set serialrx_provider = SPEK1024
set sbus_inversion = ON
set spektrum_sat_bind = 0
set spektrum_sat_bind_autoreset = 1
set telemetry_switch = OFF
set telemetry_inversion = ON
set hott_alarm_sound_interval = 5
set battery_capacity = 0
set vbat_scale = 112
set vbat_max_cell_voltage = 43
set vbat_min_cell_voltage = 33
set vbat_warning_cell_voltage = 35
set vbat_hysteresis = 1
set vbat_pid_compensation = OFF
set current_meter_scale = 400
set current_meter_offset = 0
set multiwii_current_meter_output = OFF
set current_meter_type = ADC
set align_gyro = DEFAULT
set align_acc = DEFAULT
set align_mag = DEFAULT
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 90
set max_angle_inclination = 700
set gyro_lpf = OFF
set gyro_sync_denom = 4
set gyro_lowpass_hz = 80.000
set moron_threshold = 32
set imu_dcm_kp = 2500
set imu_dcm_ki = 0
set deadband = 3
set yaw_deadband = 3
set throttle_correction_value = 0
set throttle_correction_angle = 800
set yaw_control_direction = 1
set yaw_motor_direction = 1
set yaw_jump_prevention_limit = 200
set tri_unarmed_servo = ON
set servo_lowpass_freq = 400
set servo_lowpass_enable = OFF
set super_expo_factor = 30
set failsafe_delay = 10
set failsafe_off_delay = 10
set failsafe_throttle = 1000
set failsafe_kill_switch = OFF
set failsafe_throttle_low_delay = 100
set failsafe_procedure = OFF
set rx_min_usec = 885
set rx_max_usec = 2115
set gimbal_mode = NORMAL
set acc_hardware = AUTO
set acc_lpf_hz = 10.000
set accxy_deadband = 40
set accz_deadband = 40
set acc_unarmedcal = ON
set acc_trim_pitch = 0
set acc_trim_roll = 0
set baro_hardware = AUTO
set mag_hardware = AUTO
set mag_declination = 0
set pid_process_denom = 1
set blackbox_rate_num = 1
set blackbox_rate_denom = 1
set blackbox_device = SERIAL
# profile
profile 0
############################# PROFILE VALUES ####################################
profile 0
set yaw_p_limit = 400
set pid_delta_method = MEASUREMENT
set dterm_lowpass_hz = 70.000
set dterm_average_count = 4
set iterm_reset_degrees = 200
set yaw_iterm_reset_degrees = 50
set yaw_lowpass_hz = 70.000
set pid_controller = MWREWRITE
set p_pitch = 48
set i_pitch = 29
set d_pitch = 23
set p_roll = 42
set i_roll = 30
set d_roll = 18
set p_yaw = 85
set i_yaw = 40
set d_yaw = 0
set sensitivity_horizon = 75
set p_alt = 50
set i_alt = 0
set d_alt = 0
set p_level = 50
set i_level = 50
set d_level = 100
set p_vel = 55
set i_vel = 55
set d_vel = 0
rateprofile 0
# rateprofile
rateprofile 0
set rc_rate = 100
set rc_expo = 70
set rc_yaw_expo = 34
set thr_mid = 50
set thr_expo = 0
set roll_rate = 45
set pitch_rate = 50
set yaw_rate = 65
set tpa_rate = 0
set tpa_breakpoint = 1500








